How to Understand Stepper Motor Sizes and Specifications from NEMA 17
10 min
- What Is a NEMA 17 Stepper Motor?
- What Does "NEMA 17" Mean?
- NEMA 17 Stepper Motor Dimensions
- NEMA 17 Stepper Motor Specifications
- How NEMA 17 Size Relates to Torque and Performance
- NEMA 17 vs Other Stepper Motor Frame Sizes
- How to Choose the Right NEMA 17 Stepper Motor
- From 3D Printers to CNC Machines: JLCMC's Trusted NEMA 17 Picks
- Frequently Asked Questions
- Conclusion
NEMA 17 stepper motors often surprise first-time users with their compact size. The body is roughly that of a matchbox, yet noticeably dense for its volume, with four colored wires protruding like thin antennae. Turn the casing over, and there is usually no obvious marking that explains the "17" designation. That number rarely appears on the housing itself; it exists primarily in datasheets and supplier listings, which is precisely where much of the confusion begins.
What Is a NEMA 17 Stepper Motor?
A NEMA 17 stepper motor is a hybrid stepper motor with a square faceplate measuring 1.7 by 1.7 inches. That translates to about 42 millimeters on each side. It is the default choice for desktop 3D printers, small CNC routers, laser engravers, and compact automation rigs—not because it is the most powerful option available, but because it hits a practical balance between torque, size, and power consumption. Most units you will encounter are two-phase hybrid designs, meaning they divide a full rotation into discrete steps using a combination of permanent magnets and toothed steel rotors.

What Does "NEMA 17" Mean?
NEMA stands for the National Electrical Manufacturers Association, a standards body that defines the mechanical mounting dimensions of motors. The number "17" refers to the faceplate width in tenths of an inch. So NEMA 17 means a 1.7-inch faceplate. It does not tell you how long the motor is, how much torque it produces, or how much current it draws.
Key point:
- NEMA 17 refers only to the faceplate size. Body length is the real performance variable.
- Same faceplate (42 mm × 42 mm) for every NEMA 17 motor
- Body length varies: 34 mm to 60 mm
- Longer body = more copper windings = more torque
- Two motors can share the NEMA 17 label and behave completely differently
One might be a short 34-millimeter body delivering modest torque for a lightweight extruder, while another stretches to 60 millimeters and pushes enough force to drive a small milling axis. The frame size is just the starting point for motor selection.
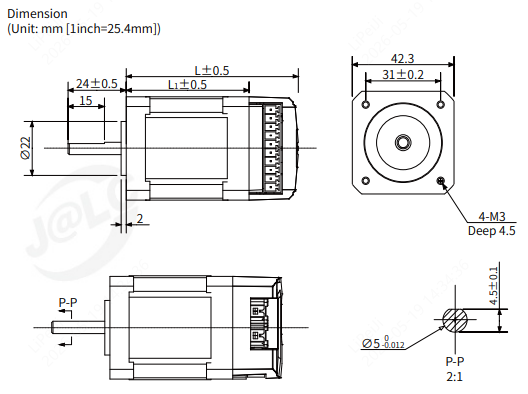
NEMA 17 Stepper Motor Dimensions
If you are designing a mounting bracket or checking clearances, the faceplate is only one measurement. The shaft diameter, body length, and mounting hole spacing all matter.
| Dimension | Typical Value |
| Faceplate (width × height) | 42 mm × 42 mm (1.7 in × 1.7 in) |
| Mounting hole spacing | ~31 mm (M3 screws) |
| Shaft diameter | 5 mm |
| Body length | 34 mm to 60 mm (varies by model) |
| Total weight | 200 g to 400 g |
The body length is the hidden variable. A longer motor packs more copper windings and a deeper rotor stack, which directly increases torque. If you are replacing a NEMA 17 in an existing machine, match the body length and shaft diameter first. The faceplate will always fit, but a 60 mm motor might crash into a neighboring bracket where a 40 mm motor previously sat without issue.
NEMA 17 Stepper Motor Specifications
Datasheets tend to bury the useful numbers under abbreviations. Here is what actually matters, grouped by type:
Mechanical specs
- Step angle: Nearly all NEMA 17 hybrid steppers use a 1.8° step angle, giving 200 full steps per revolution. Most modern drivers use microstepping to divide those steps further, but the underlying mechanical resolution remains 1.8°.
- Shaft diameter: Typically 5 mm. Match this to your pulley, gear, or coupling.
Electrical specs
- Current: Rated phase current typically ranges from 1 A to 2 A. Your driver must be able to supply this continuously. Running a high-torque motor at too low a current will make it weak and noisy; running it above rating will overheat the windings.
- Resistance and inductance: These determine how the motor responds to your driver voltage. Low-inductance motors perform better at higher speeds when paired with higher supply voltages. If your driver runs at 12 V, a high-inductance motor will feel sluggish compared to the same setup at 24 V.
Performance-related specs
- Holding torque: The force the motor can exert when stationary and fully energized. In practice, usable torque drops as speed increases, so always look for the torque curve, not just the single holding-torque number.
- Torque tiers by body length:Low torque (up to 0.40 N·m): 33–40 mm body. Good for 3D printer extruders and lightweight laser heads.Standard torque (0.40-0.60 N·m): 40-47 mm body. The workhorse for XY gantries, bed leveling, and standard CNC axes.High torque (0.60+ N·m): 47-60 mm body. Suitable for heavier CNC Z-axes, direct-drive extruders, or machines with high friction.
How NEMA 17 Size Relates to Torque and Performance
There is a persistent assumption that frame size equals power. It does not. A NEMA 17 motor is not inherently weak, and a NEMA 23 motor is not automatically better. Torque scales mainly with length and winding design, not just the faceplate dimensions. A long NEMA 17 motor can out-torque a short NEMA 23 motor in some cases.
Where the 17 struggles are heat dissipation and mechanical leverage. The smaller housing has less surface area to shed heat, and the smaller rotor has less inertia, which helps with acceleration but limits raw force. For light loads and moderate speeds—think 3D printer bed leveling or a laser head tracing thin plywood—the NEMA 17 is often operating well inside its comfort zone.
NEMA 17 vs Other Stepper Motor Frame Sizes
Stepping up to NEMA 23 means jumping to a 57 mm faceplate and significantly higher torque, usually above 1 N·m. The trade-off is bulk, weight, and current demand. NEMA 23 motors often need 2 A to 4 A per phase and physically will not fit into compact gantries designed around the 42 mm standard. On the other end, NEMA 14 and smaller frames exist for ultra-compact designs, but they sacrifice torque to the point where they are rarely used for motion axes in desktop machines. NEMA 17 sits in the middle: large enough to move real mechanical loads, small enough to disappear inside a printer frame.
| Feature | NEMA 8 | NEMA 11 | NEMA 14 | NEMA 17 | NEMA 23 | NEMA 24 | NEMA 34 |
| Faceplate size | 20 mm × 20 mm (0.8 inches) | 28 mm × 28 mm (1.1 inches) | 35 mm × 35 mm (1.4 inches) | 42 mm × 42 mm (1.7 inches) | 57 mm × 57 mm (2.3 inches) | 60 mm × 60 mm (2.4 inches) | 86 mm × 86 mm (3.4 inches) |
| Typical body length | 30 mm – 50 mm | 32 mm – 51 mm | 26 mm – 48 mm | 34 mm – 60 mm | 40 mm – 112 mm | 45 mm – 86 mm | 65 mm – 150 mm |
| Typical holding torque | 0.02–0.08 N·m | 0.06–0.15 N·m | 0.08–0.35 N·m | 0.30–0.80 N·m | 0.80–3.00 N·m | 1.50–4.00 N·m | 3.00–12.00 N·m |
| Rated current | 0.2–0.6 A | 0.5–1.0 A | 0.8–1.5 A | 1.2–2.0 A | 2.8–4.0 A | 3.0–5.0 A | 4.2–6.0 A |
| Inductance/inertia | very low | very low | low | low–medium | medium | high | very high |
| Best for | Micro positioning, medical devices, mini optics | Small instruments, lightweight automation | Compact mechanisms, light-duty motion | 3D printers, desktop CNC, laser engravers | Larger CNC, mills, rotary tables | Heavy-duty linear stages, industrial automation | Industrial CNC machines, gantries, robotics arms |
How to Choose the Right NEMA 17 Stepper Motor
The selection of a suitable NEMA 17 stepper motor should start from the load requirements rather than the motor itself, combined with torque margin and system constraints.
Step 1: Load and Torque Estimation
- Estimate the real axial load, including both static and dynamic components.
- Include friction, acceleration requirements, and mechanical disadvantages from transmission systems such as belts or lead screws.
- Calculate the required output torque.
Step 2: Torque Margin Definition
- Apply a 30%–50% safety margin on top of the calculated torque.
- This accounts for startup shocks, load variation, and unmodeled losses.
Step 3: Mechanical and Physical Constraints
- Measure available installation space, including depth and flange dimensions.
- Verify shaft diameter compatibility with couplers or pulleys (commonly 5 mm for NEMA 17).
- Ensure mounting hole pattern and mechanical structure compatibility.
Step 4: Driver Current and Electrical Limits
- Confirm whether the driver can supply the motor's rated current.
- Prevent torque loss or missed steps due to insufficient current.
Step 5: Voltage System Consideration
- A 24V system generally allows higher speeds and broader motor selection flexibility.
- A 12V system is more sensitive to inductance and typically requires low-inductance windings.
- Higher voltage generally improves high-speed performance, subject to driver limitations.
Step 6: Final Selection and Validation
- Compare torque-speed curves rather than relying only on holding torque.
- Validate temperature rise and step loss under real operating conditions.
- Perform prototype testing and iterate on parameters if necessary.
From 3D Printers to CNC Machines: JLCMC's Trusted NEMA 17 Picks
For buyers who want to skip the deep datasheet hunt, JLCMC stocks a curated range of NEMA 17 stepper motors covering the common body lengths and torque levels used in desktop manufacturing equipment. Our catalog includes standard 40 mm and 48 mm variants suitable for 3D printer extruders and XY gantries, as well as higher-torque 60 mm options for small CNC Z-axes. Each listing provides clear, standardized specifications to simplify model comparison and selection. We also provide matching stepper drivers and mechanical couplings, so you can source all the motors and components needed for your motion axis in one place, without having to browse multiple online stores.
Frequently Asked Questions
Does NEMA 17 refer to the motor length?
No. It refers only to the 1.7-inch faceplate width. Length varies by model.
Can I use any NEMA 17 motor in my 3D printer?
Mechanically, yes, if the body fits. Electrically, you need to match or adjust the driver current to the motor's rated phase current.
Why do two NEMA 17 motors have different torque ratings?
Torque depends on body length, winding design, and rotor stack depth. A longer motor of the same frame size usually produces more torque.
Is a NEMA 23 always better than a NEMA 17?
Only if you genuinely need the extra torque and have the space, mounting structure, and power supply to support it. For many desktop projects, NEMA 17 is the more practical fit.
What voltage should I run a NEMA 17 at?
Most perform well at 12 V or 24 V. Higher voltage generally improves high-speed torque, provided your driver is rated for it.
Conclusion
There is something almost invisible about a good NEMA 17 motor when it is doing its job correctly. It sits inside a printer frame or under a CNC bed, clicking through its steps without drama, small enough that you forget it is there. Understanding its dimensions and specifications does not require memorizing standards bodies or decoding every datasheet symbol. It mostly comes down to one simple idea: the number on the frame is just the faceplate size. Everything that actually determines how the motor behaves—length, current, torque, and heat—lives in the details that follow. Get those right, and the motor simply disappears into the system—performing reliably, consistently, and exactly as the application demands.
Keep Learning
Closed Loop Stepper Motor: How It Works, Benefits, and Applications
Stepper motors have long been a go-to solution for precise positioning in industrial automation. But traditional open-loop stepper systems come with a well-known limitation: they have no way of knowing whether the motor actually reached its commanded position. If steps are lost due to a sudden load change or mechanical jam, the system carries on, unaware of the error. Closed loop stepper motors solve this problem by adding an encoder and a feedback-capable driver to the system. The result is a motor t......
Unipolar vs Bipolar Stepper Motor: Key Differences and How to Choose
You're looking at two NEMA 23 stepper motors with similar torque ratings on paper and a price difference that doesn't quite make sense. One is listed as bipolar, the other unipolar. The datasheet tells you the holding torque, rated current, and step angle, but it doesn't explain why the winding configuration matters — or whether it matters for your application. It does, but not always in the way most comparisons suggest. The performance difference between unipolar and bipolar motors starts with a simp......
Permanent Magnet Stepper Motor: How It Works and How to Choose the Right One
Introduction Permanent magnet stepper motors are widely used in applications such as printers, HVAC actuators, ticket dispensers, and laboratory devices, where reliable incremental motion is more important than ultra-high positioning accuracy. Unlike variable reluctance designs, PM stepper motors use a permanent magnet rotor that interacts directly with stator-generated magnetic fields to produce discrete movement. This design provides useful low-speed torque, straightforward control, and cost-effecti......
NEMA Stepper Motor Sizes, Specifications, and Frame Size Chart Explained
NEMA stepper motor sizes standardize the mechanical interface—faceplate width, bolt pattern, and pilot diameter—but leave torque, thermal behavior, and high-speed performance to the manufacturer's design choices. Conflating frame size with motor capability is a frequent source of integration failure. The following sections detail the exact dimensions of each NEMA frame and explain how to read the specifications that actually determine whether a motor will work in your application. What Does NEMA Mean?......
How to Select a Stepper Motor: Step-by-Step Guide
Introduction Proper stepper motor sizing is essential for achieving reliable positioning performance. Selecting the wrong stepper motor usually shows up as missed steps, excess heat, or stalled motion mid-cycle. The root cause is rarely the motor itself—more often, the selection process skipped load verification or assumed catalog torque ratings apply directly to the application. This guide breaks down a practical sizing workflow. It covers torque calculations, motion profile definition, and the drive......
Optimizing Stepper Motor Speed: Factors, Dynamics, and Control Strategies
Introduction Stepper motor speed optimization is where electrical drive design meets mechanical dynamics. Push too hard without voltage margins, and mid-band resonance stalls the rotor. Run overly conservative profiles on a high-inertia gantry, and cycle times suffer. The real challenge isn't hitting a datasheet RPM—it's maintaining positional accuracy as load, driver, and thermal conditions shift. Understanding stepper motor speed limits, measurement methods, and control strategies is essential for b......